 In the context of this project, we applied the principles of neuromorphic computing to the classification of EMG signals, proposing an innovative approach to prostheses control. Although the market already provides high-tech solutions in fact, the process of adapting industry-standard prostheses to patients is nowadays complex and lengthy. For some aspects, it can be said that it is the patient the one demanded to learn how to use the prosthesis in an appropriate manner, rather than simply having a prosthesis capable of responding naturally to the patient.
In the context of this project, we applied the principles of neuromorphic computing to the classification of EMG signals, proposing an innovative approach to prostheses control. Although the market already provides high-tech solutions in fact, the process of adapting industry-standard prostheses to patients is nowadays complex and lengthy. For some aspects, it can be said that it is the patient the one demanded to learn how to use the prosthesis in an appropriate manner, rather than simply having a prosthesis capable of responding naturally to the patient.
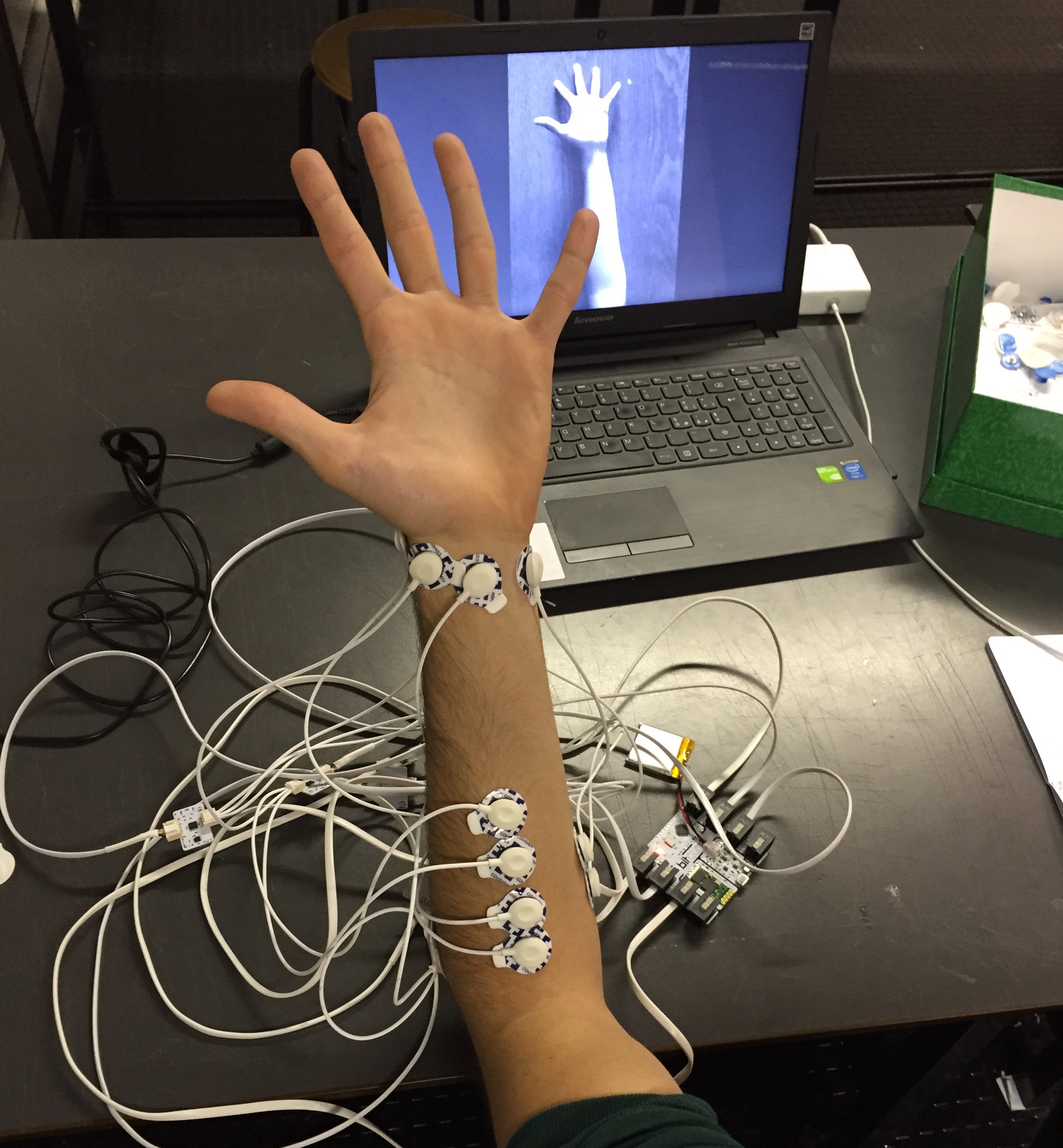
In this context, our solution tries to shift the paradigm: exploiting the learning capabilities of a neural network, we propose an adaptive prosthesis control, capable of responding to the patient after a preliminary training phase lasting only 15 minutes.
In this summary, we briefly review the process we followed during the design of the solution, describing our work in relation to both the growing interest in neuromorphic computing and the requirements we received from partner institutions. Moving from a study of state of the art approaches to neural networks, we studied the efficiency and the feasibility of implementations using memristors as circuital components. We also proposed a new process of memristor production using inorganic (TiO2) and nanocomposite polymer matrix-based materials.
Our research on the topic of memristors production has been published and presented at the Nanotech World Techconnect conference in the cities of Washington D.C. and Birmingham. As far as the research on neuromorphic computing and learning algorithms is concerned, our work has been presented at Nonlinear Dynamics in Computational Neuroscience: from Physics and Biology to ICT conference in Turin, and we also succeeded in the implementation of a working prototype of the proposed solution.
Principal Academic Tutor
Fernando Corinto, Department of Electronics and Telecommunication, Politecnico di Torino
Academic Tutors
MariaPia Pedeferri, Department of Chemistry, Materials and Chemical Engineering “Giulio Natta” (Dcmc), Politecnico di Milano
Riccardo Zecchina, Department of Applied Science and Technology, Politecnico di Torino
Danilo Demarchi, Department of Electronics and Telecommunication, Politecnico di Torino
External institutions
Istituto Italiano di Tecnologia – IIT
Center for Space Human Robotics
External Tutors
Alessandro Chiolerio, Istituto Italiano di Tecnologia
Team members
Federico Badini, Computer Engineering, Politecnico di Milano
Stefano Bodini, Computer Engineering, Politecnico di Milano
Alessandro Costanzo, Electronic Engineering, Politecnico di Torino
Luca Della Vedova, Biomedical Engineering, Politecnico di Milano
Mario Lavanga, Biomedical Engineering, Politecnico di Milano [Team Controller and Communicaton Coordinator]
Alessandro Morelli, Automation Engineering, Politecnico di Milano
Riccardo Pisoni, Physics Engineering, Politecnico di Milano
Enzo Tartaglione, Electronic Engineering, Politecnico di Torino